


The pursuit of knowledge and the drive to bridge the gap between theory and real-world application have been at the heart of my PhD journey. A key element of this path is ensuring that my research output is a tangible product benefitting my community, which inspired the creation of Project Varuna.
Built on years of research into data-driven modeling and control design for autonomous vehicles, Project Varuna leverages the theoretical framework of Koopman Operator Theory (KOT) to enable autonomy in complex on-road and off-road environments.
Why Project "Varuna" ?
In essence, KOT aims to achieve global linearization of nonlinear systems by transforming them into a higher-dimensional functional space (lifting), where the dynamics evolve linearly. As such, the name Project Varuna is inspired from Indian mythology, with Varuna being the god of skies and water, symbolizing the lifting in Koopman Theory and the flows associated with dynamical systems.
Mission Statement:
At the heart of Project Varuna is a deep commitment to giving back to the robotics and controls community. We build upon the work of the field's trailblazers, whose research and innovations have laid the groundwork for my research. In the same spirit, Project Varuna seeks to offer a refined, accessible tool for fellow researchers and engineers. This platform distills the insights and innovations from my work into a user-friendly interface, empowering anyone to build explainable, data-driven models with just a few clicks making advanced autonomy accessible to all.
Koopman Operator Theory and It's Role in Project Varuna
The focus of my PhD research is enabling autonomous driving capabilities in challenging conditions. This involves effectively capturing complex underlying dynamics and developing feedback controllers to achieve precise path tracking.
Traditionally, modeling of UGV has relied on first-principles based white-box models to represent complex dynamics and wheel-terrain interactions. However, due to inherent nonlinearities, prediction and control synthesis are often difficult. On the other hand, black-box learning-based methods create an implicit system representation, generating policies that achieve desired objectives but often sacrifice explainability and interpretability.
This is where Koopman Operator Theory (KOT) becomes pivotal. By lifting nonlinear systems into a higher-dimensional space where their dynamics can be approximated linearly, this approach enables us to model and control complex systems through the lens of linear systems theory.
However, applying the KOT in data-driven context requires a finite-dimensional approximation of the Koopman operator. A crucial component of which is choosing the right set of lifting function. My research addresses this by constructing observables suited to the kinematic constraints of UGVs to effectively capture dynamics, forming the basis for robust, real-world solutions.
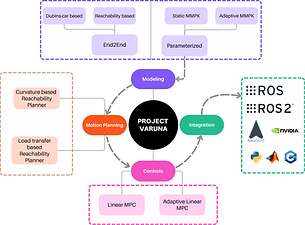
With initial success showcased on 1/10th scale vehicles, I expanded my research to develop an end-to-end framework that retains the explainability of linear models while tackling challenges like data bias, generalizability through pose-independent modeling, and bridging Sim2Real gaps using dynamic planners. This led to the development of the Multi-Model Parameterized Koopman (MMPK) framework, which is the foundation of Project Varuna.
Over time, MMPK has evolved, enabling seamless, data-driven autonomy across a wide range of platforms from regular operation to extreme off-road environment ensuring adaptability, robustness, and high-performance autonomy in any terrain.
Explore all the salient features of Project Varuna which makes it a capable and promising tool for data-driven modeling of UGVs!


Sophisticated Path Planners
Project Varuna comes with 2 novel reachability-based planners designed to adapt to changing conditions and mitigate the Sim2Real gap.

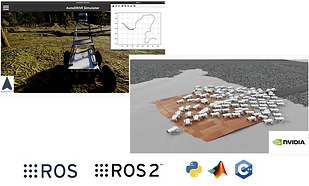
Integration
This framework was designed with flexibility and ease of use in mind. It seamlessly connects to multiple simulators and workflows through the inbuilt ROS interface.


Easy to Use GUI
Select data, parameters, and reference trajectory with super intuitive GUI. That's it! No dependency management, interpreter setup. All you need is a machine with Python3 and ROS and off you go!
Features

End2End Workflow
This framework enables data-driven modeling, dynamic motion planning, and controls for UGV platforms in a single integrated workflow.

Multi-Scale Deployment
Project Varuna is designed from the ground up to enable data-driven modeling of a multitude of UGV platforms. From small scale RC cars to mid to full- scale vehicles all under one framework.


On-Road/Off-Road Autonomy
Experience autonomy that adapts to every scenario. Whether it's indoor mini circuits, traditional concrete roads, or the most challenging off-road terrains, you can seamlessly navigate across diverse environments.
People
Project Varuna wouldn't be possible without the continued support of my mentors and PhD advisors Dr. Venkat Krovi and Dr. Umesh Vaidya.


